
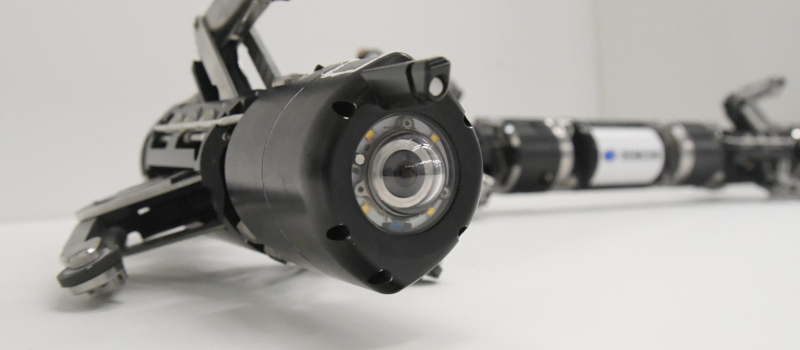
SubMerge is an initiative of the Dutch drinking water supply companies Vitens, Evides and Brabant Water. We are developing an autonomous in-pipe inspection robot. We are intending to reach the following performance data.
Autonomous operation
The operator prepares a route plan. The robot enters the network through an insertion point. After starting up, the robot follows the route plan. Because drinking water pipes are at least 1 meter below surface level, the robot has to operate completely autonomous. Therefore acquired data is used by the robot to make its own decisions. When encountering an obstacle or unexpected turn, the robot returns to its starting point and reports this to the operator. The robot can for example anticipate on:
- T-sections, bends, gate valves and diameter transitions
- To high water speed (> 0,5 m/s), to high water pressure (>10 bar) or pour visibility
- Rough materials or unknown situations
- Internal errors
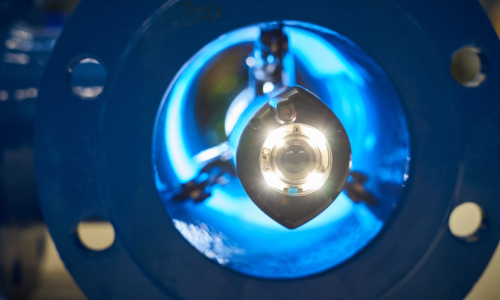
In case of emergency the robot clamps itself to the drinking water pipe and start sending an emergency signal. This signal is powerful enough to spot above the ground surface.
Measurement

- Camera images are used to detect bumps in pipe diameter and obstacles.
- The wheels and leveling sensors are used for X,Y,Z-measurement within an occurrence of 0.3 meter.
- The Hydrophone is used to detect water leaks from 250 l/m and more.
- An ultrasound sensor is use for measuring wall thickness and bumps.
The acquired data is transmitted by the base station to the operator.
Performance
The robot can reach speeds up to 360 m/h. On a single charge the robot travels a distance of up to 6 km. Arriving at the base station, the robot recharges within several hours. The base stations are also used to exchange acquired inspection data and plan for a new mission.
Flexibility

- Pipe diameters: 90 – 315 mm
- Horizontal bends: -90° till +90°
- Vertical movement: -45° till +45°
- Distance between bends: minimum 2 meter
- Biofilm and pipe roughness: up to 5 mm
Quality & Certification
The robot is still in the development phase. High quality standards are taken into account, such as CE, KIWA water marks and battery certification.
